动态规划
动态规划
# 动态规划
一般是二维问题
首先,动态规划问题的一般形式就是求最值。 动态规划其实是运筹学的一种最优化方法,只不过在计算机问题上应用比较多,比如说让你求最长递增子序列呀,最小编辑距离呀等等。
既然是要求最值,核心问题是什么呢?求解动态规划的核心问题是穷举。因为要求最值,肯定要把所有可行的答案穷举出来,然后在其中找最值呗。
动态规划这么简单,就是穷举就完事了?我看到的动态规划问题都很难啊!
首先,动态规划的穷举有点特别,因为这类问题存在「重叠子问题」,如果暴力穷举的话效率会极其低下,所以需要「备忘录」或者「DP table」来优化穷举过程,避免不必要的计算。
而且,动态规划问题一定会具备「最优子结构」,才能通过子问题的最值得到原问题的最值。
另外,虽然动态规划的核心思想就是穷举求最值,但是问题可以千变万化,穷举所有可行解其实并不是一件容易的事,只有列出正确的「状态转移方程」,才能正确地穷举。
以上提到的重叠子问题、最优子结构、状态转移方程就是动态规划三要素。具体什么意思等会会举例详解,但是在实际的算法问题中,写出状态转移方程是最困难的,这也就是为什么很多朋友觉得动态规划问题困难的原因,我来提供我研究出来的一个思维框架,辅助你思考状态转移方程:
明确 base case -> 明确「状态」-> 明确「选择」 -> 定义 dp 数组/函数的含义。
# 备忘录方法
备忘录方法是动态规划方法的变形。与动态规划算法不同的是,备忘录方法的递归方式是自顶向下的,而动态规划算法则是自底向上的
# 动态规划的 3 个性质(必要条件)
能采用动态规划求解的问题的一般要具有 3 个性质:
最优化原理:如果问题的最优解所包含的子问题的解也是最优的,就称该问题具有最优子结构,即满足最优化原理。
无后效性:即某阶段状态一旦确定,就不受这个状态以后决策的影响。也就是说,某状态以后的过程不会影响以前的状态,只与当前状态有关。
有重叠子问题:即子问题之间是不独立的,一个子问题在下一阶段决策中可能被多次使用到。(该性质并不是动态规划适用的必要条件,但是如果没有这条性质,动态规划算法同其他算法相比就不具备优势)
# 和分治法区别
动态规划适用于分解得到的子问题往往不是相互独立的。在这种情况下如果采用分治法,有些子问题会被重复计算多次,动态规划通过记录已解决的子问题,可以避免重复计算。
# 和贪心算法区别
动规是由前一个状态推导出来的,而贪心是局部直接选最优
# 动态规划流程
一般流程就是三步:暴力的递归解法 -> 带备忘录的递归解法 -> 迭代的动态规划解法。
就思考流程来说,就分为一下几步:找到状态和选择 -> 明确 dp 数组/函数的定义 -> 寻找状态之间的关系
- 确定状态
研究最优策略的最后一步、化为子问题
- 转移方程
根据子问题定义直接得到
- 初始条件和边界情况
细心,考虑周全
- 计算顺序
利用之前的计算结果
# 动态规划框架
# 初始化 base case
dp[0][0][...] = base
# 进行状态转移
for 状态1 in 状态1的所有取值:
for 状态2 in 状态2的所有取值:
for ...
dp[状态1][状态2][...] = 求最值(选择1,选择2...)
2
3
4
5
6
7
# 动态规划题目特点
- 计数
(1) 有多少种方式走到右下角
(2) 有多少种方法选出 k 个数使得和是 Sum
- 求最大值最小值
(1) 从左上角走到右下角路径的最大数字和
(2) 最长上升序列长度
- 求存在性
(1) 取石子游戏, 先手是否必胜
(2) 能不能选出 k 个数使得和是 Sum
# 动态规划应用
路径问题(最小路径和、不同路径)
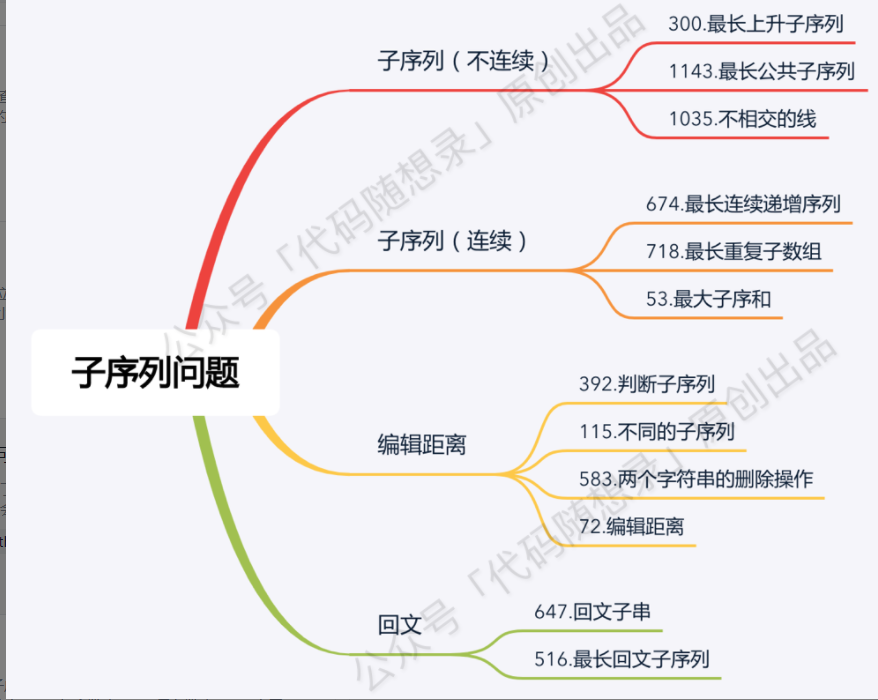
子序列问题(最长回文子序列、不同的子序列)